Elektromotor je stroj, který přeměňuje elektrickou energii spotřebovanou ze sítě na mechanickou energii. Elektromotory jsou hlavním spotřebitelem elektrické energie. Více než 60 % vyrobené elektřiny přeměňují elektromotory na mechanickou práci. Nejrozšířenější jsou třífázové asynchronní motory (IM) pro svou jednoduchost, spolehlivost v provozu a nízkou cenu. V domácích spotřebičích se používají nízkoenergetické jedno- a dvoufázové AD, napájené dvouvodičovou sítí.
Krevní tlak se zkratem rotor
Motor se skládá z pevné části – statoru a rotujícího rotoru. Hlavní částí statoru je pouzdro 1 s lisovaným jádrem 2. Jádro statoru je sestaveno z tenkých kotoučů z elektrooceli (pro snížení ztrát vířivými proudy a hystereze). Na vnitřním válcovém povrchu jádra jsou drážky 3, ve kterém je uloženo třífázové vinutí statoru, sestávající ze tří fázových vinutí (na obr. 3.17, Obr. а není zobrazeno). Fázová vinutí jsou vzájemně posunuta o 120° a lze je zapojit do hvězdy nebo trojúhelníku. Začátek fází C1, C2, C3 a jejich konce C4, C 5, C6 přinesl do krabice na statoru.
Uvnitř statoru je rotor, sestávající z hřídele 4, na kterém je nalisováno válcové jádro 5 (Obr. а). Jádro rotoru se skládá z jednotlivých ocelových disků s drážkami 6, ve kterém je umístěno vinutí rotoru. Podle typu vinutí se rotory dělí na: 1) nakrátko; 2) fáze. Zkratované vinutí má konstrukci typu „squirrel cage“ a skládá se z tyčí umístěných v drážkách rotoru 1, na koncích zkratované kroužky 2 . Tyče a kroužky jsou vyrobeny z mědi nebo hliníku. Pro chlazení IM jsou na prstencích umístěny lopatky ventilátoru.
Fázovaný rotor IM
V drážkách 1 vinutý rotor obsahuje třífázové vinutí 2spojeny hvězdou. Jeho konce jsou připájeny ke kontaktním kroužkům izolovaným od hřídele. 3, které sousedí s kartáči s pružinou 4. Kartáče a kroužky tvoří elektrické kontakty, přes které je k vinutí rotoru připojen třífázový reostat 5. Reostat 5 může být spouštěcí (pro omezení rozběhových proudů rotoru a statoru a zvýšení rozběhového momentu IM), nastavovací (pro změnu otáček rotoru) nebo rozběhově nastavovací. Z konců je těleso statoru uzavřeno štíty 7, v jehož středu jsou nalisována ložiska hřídele rotoru.
Princip činnosti indukčního motoru
Směry vektorů magnetické indukce (а); časový diagram statorových proudů (б); vektory celkové indukce (в–д)
Ve skutečném IM se každé fázové vinutí statoru skládá ze samostatných cívek umístěných v sérii, které zabírají několik sousedních štěrbin jádra, což umožňuje aproximovat rozložení magnetické indukce podél mezery mezi statorem a rotorem na sinusový a snížit rozměry statoru. Zvažte zjednodušenou konstrukci statoru, ve které se každé fázové vinutí skládá z jedné soustředěné cívky. Cívka letadla ACH, PODLE, ЖZ a v souladu s tím jsou jejich osy posunuty v prostoru o 120° (obr. а). Jsou označeny začátky vinutí, obvykle znázorněné jako jeden závit А, В, Сa konce – X, Y, Z.
Nechť jsou statorová vinutí zapojena do symetrické třífázové sítě, která v nich vytvoří symetrický třífázový systém proudů iA,, iB, iC (Obr. б). Zvolíme kladný směr proudu v každém vinutí od začátku do konce, to znamená, že kladný proud ve vodiči sousedícím se začátkem vinutí směřuje od nás (kříž) a ve vodiči sousedícím s koncem , směrem k nám (bod). Kladné směry vektorů magnetické indukce BА, BВ, BС určeno pravidlem gimlet (obr. а). Magnetické pole každé cívky se v čase mění (pulsuje) podle sinusového zákona, přičemž se drží směr osy pulzace. Najděte polohu vektoru celkové indukce BS, vytvořený třemi vinutími, ve stejně vzdálených bodech v čase t1, t2, t3 (obr. 3.19, б). Na t = t1 proud iА pozitivní a rovné Ima proudy iB, iC negativní a rovné Im/2 (na obr. а směry proudů ve vodičích vinutí jsou označeny „´“, „·“, když t = t1). Protože indukce a proud jsou ve fázi se znaménky, pak BA(t1) = Bm, BB(t1) = BC(t1) = –Bm/2, kde Bm – amplituda indukce jedné cívky.
Směry indukčních vektorů cívek jsou určeny gimletovým pravidlem (obr. в). Shrnutí vektorů BA, BB, BC, zjistíme, že vektor BS v tuto chvíli t = t1 směrováno vodorovně doleva a rovná se 1,5Bm. S t = t2 = t1 + T1/6, kde T1 = 1 /f1 – perioda napájecího napětí, BS zaujme polohu znázorněnou na obr. г, zatímco t = t3 – podle obr. д. Takže vektor BS se otáčí rovnoměrně ve směru hodinových ručiček a prochází v čase Т/6 úhel 60° = = π/3 rad. Vektor úhlové rychlosti BS Ω1 = π/3: (Т /6) = 2πƒ1. Rychlost rotace krevního tlaku se obvykle odhaduje podle frekvence rotace n1měřeno v otáčkách za minutu. Pak n1 = 60Ω1/(2p) = 60ƒ1, n1 = 9,55Ω1. V tomto případě má rotující magnetické pole jeden severní a jeden jižní pól, tedy počet pólových párů р = 1. Je-li každé fázové vinutí statoru rozděleno na р sériově zapojených skupin cívek a skupina je rovnoměrně posunuta po obvodu statoru, pak bude mít rotující magnetické pole statoru р páry tyčí (2р střídavé N и S póly). Toto pole odpovídá frekvenci otáčení n1 a úhlová rychlost W1:
Při připojení vinutí pevného statoru k třífázové napájecí síti a rotující magnetické pole, jehož rychlost otáčení je určena daným vzorcem. Pole statoru křižuje vodiče vinutí rotoru a indukuje v nich EMF, pod jehož vlivem se v těchto vodičích objevují indukční proudy. Na každý vodič působí síla s proudem v magnetickém poli, takže na hřídeli rotoru vzniká točivý moment М, což způsobí rotaci rotoru ve směru točivého pole statoru. Jak IM zrychluje, točivý moment М se mění, dokud se neustaví rovnováha М = МсKde Мс – moment odporu (brzdný moment) vytvářený hnaným mechanismem (čerpadlo, odstředivka, ventilátor atd.) a třecími silami. Bilancování momentů odpovídá ustálenému stavu motoru s konstantními otáčkami rotoru n = konst.
posuvné s relativní rozdíl v rotačních frekvencích statorových a rotorových polí se nazývá:
kde Ω = pn/30″ n/9,55 je úhlová rychlost rotoru (rad/s). Vzhledem k tomu Мс = 0 (ideální volnoběh), rotor teoreticky dosáhne otáček statorového pole, tzn. n = n1, (s = 0). V tomto případě se vodiče vinutí rotoru neprotnou s magnetickými čarami pole statoru, indukované proudy v rotoru zmizí a točivý moment М se stane nulovým: М = Мс = 0. Na hřídeli IM je vždy moment odporu Мсvlivem tření v ložiskách, odporu vzduchu atd., takže skutečné volnoběžné otáčky jsou o něco nižší n1: nxx »0,99n1 (sxx »0,01). Účinnost krevního tlaku je největší při malém skluzu, tedy nastaveno snom = 0,02¸0,08, tj. nnom = = (0,92¸0,98)n1. Reverzace motoru (změna směru otáčení) se provádí změnou směru otáčení statorového pole. Chcete-li to provést, musíte změnit pořadí fází statorového napětí, tj. prohodit závěry libovolných dvou fází napájecí sítě.
Jedním z nejběžnějších typů elektrických strojů na světě je indukční motor. Vzhledem ke své vysoké spolehlivosti a nenáročnosti v provozu jsou takové jednotky široce používány v celé řadě průmyslových odvětví a zemědělství, pomáhají řešit domácí a obecné výrobní problémy jakékoli složitosti. Proto v tomto článku podrobně zvážíme vlastnosti asynchronních motorů.
Zařízení
Konstrukčně nejjednodušší asynchronní stroj je rám rotující ve střídavém magnetickém poli. V praxi má však tento model spíše průzkumný charakter a v průmyslu nemá praktické uplatnění. Proto na obrázku 1 níže budeme uvažovat zařízení současného modelu asynchronního elektromotoru.
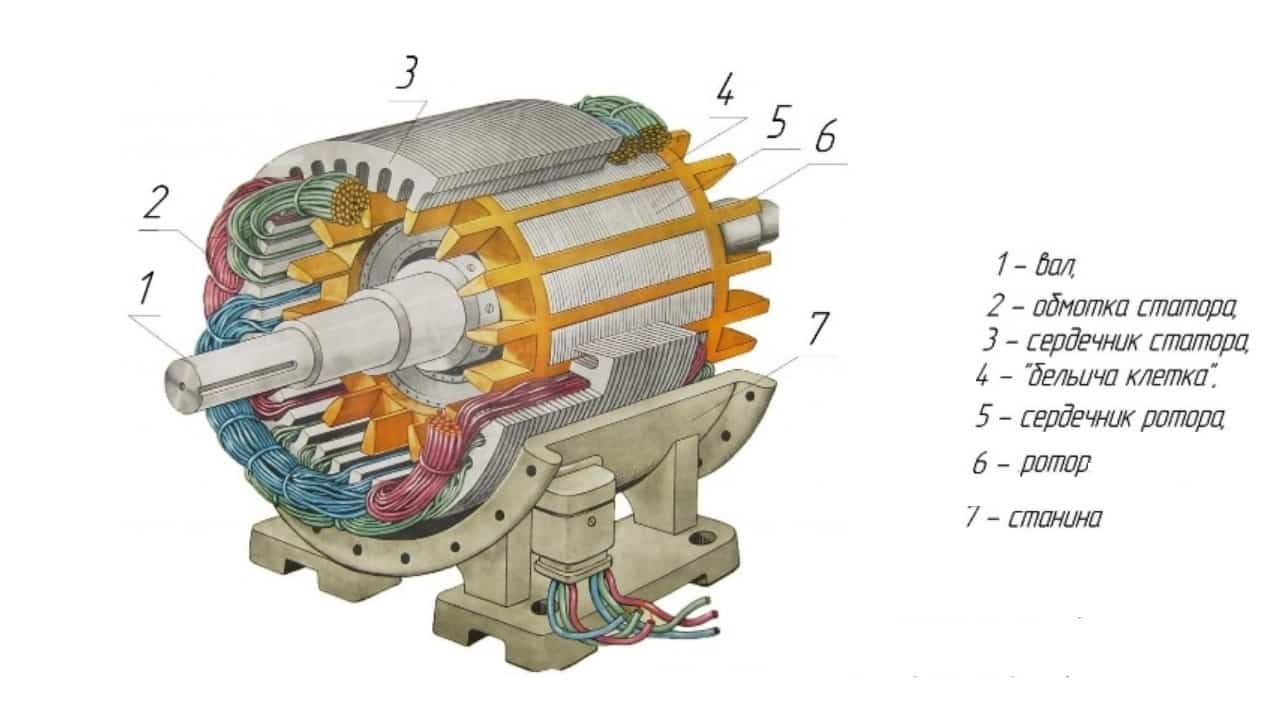
Rýže. 1. Zařízení asynchronního elektromotoru
Celý motor je umístěn ve skříni postele 7, jeho hlavním úkolem je poskytnout dostatečnou mechanickou pevnost, aby odolala dostatečným silám. Čím vyšší je tedy výkon jednotky, tím větší by měla být pevnost rámu a karoserie.
Uvnitř těla je instalováno jádro stator 3, působící jako magnetický vodič pro elektrické vedení pracovního pole. Pro snížení ztrát v oceli je magnetický obvod vyroben z laminovaných plechů, u řady modelů se však používá i monolitické provedení.
Zapadá do drážek jádra statoru navíjení 2, navržený tak, aby procházel elektrickým proudem a generoval EMF. Počet vinutí bude záviset na počtu pólových párů na fázi. Také z hlediska položených vinutí se elektromotory dělí na:
- třífázový;
- dvoufázový;
- jednofázový.
Uvnitř statoru je pohyblivý prvek – rotor 6. Konstrukčně může být rotor klecový nebo fázový, obrázek ukazuje první možnost. Rotor obsahuje jádro 5, rovněž z vrstvené oceli a klec pro veverky 4. Celá konstrukce je napíchnuta na kov hřídel 1 přenášející rotaci a mechanickou sílu.
Princip činnosti
Spočívá ve vytvoření elektromagnetického pole kolem vodiče, kterým protéká elektrický proud. U asynchronního elektromotoru tento proces začíná ihned po přivedení napětí na vinutí statoru, načež se v rotoru indukuje EMF vzájemné indukce, která indukuje vířivé proudy v kovovém rámu. Přítomnost vířivých proudů způsobuje generování vlastního EMF, které tvoří elektromagnetické pole rotoru. Nejúčinnější účinnost asynchronního elektrického stroje je dosaženo při provozu z třífázové sítě.
Konstrukčně jsou vinutí statoru vzájemně odsazena v prostoru o 120°, což je znázorněno na obrázku 2 níže:

Rýže. 2. Geometrický fázový posun ve statoru
Tato technika umožňuje přestavět magnetické pole pracovních vinutí v přísném souladu s napětím třífázové sítě, která má podobný rozdíl v křivkách elektrické hodnoty.

Rýže. 3. Princip vzniku magnetického toku asynchronního motoru
Na obrázku 3 výše jsou všechny tři fáze zobrazeny v různých barvách, aby bylo snazší pochopit proces, také ukazuje křivku proudů tekoucích ve fázích indukčního motoru. Nyní se podívejme na fyzikální procesy ve vinutí motoru pro tři polohy zobrazené na obrázku:
- I – v této poloze teče maximální proud v červeném vinutí motoru a hodnota proudu ve žlutém a modrém je stejná. Hlavní tok siločar je tvořen červenou fází a další dvě ji doplňují.
- II – v tomto bodě je žlutá sinusoida rovna nule, takže nevytváří žádný tok a červený a modrý proud jsou stejné. Proud je tvořen dvěma fázemi najednou a posouvá se ve směru hodinových ručiček doprava, čímž se zatáčí.
- III – třetí bod je charakterizován maximální proudovou zátěží pro modrou křivku a červená a žlutá mají stejnou amplitudu, ale opačný směr. V důsledku toho se maximální magnetické čáry jižního a severního pólu posunou o dalších 30°.
Podle tohoto principu se magnetické pole statoru otáčí v asynchronním elektrickém stroji během periody. Vlivem magnetické interakce s polem statoru asynchronního elektromotoru dochází k translačnímu pohybu rotoru kolem jeho osy. Dá se říci, že rotor se snaží dohnat pole statoru. Je to kvůli rozdílu v rotaci polí, že se tento typ elektrického stroje nazýval asynchronní.
Rozdíl od synchronního motoru
Spolu s jednoduchými asynchronními elektrickými stroji se v průmyslu používají i synchronní jednotky. Hlavním rozdílem mezi synchronním motorem je přítomnost pomocného vinutí na rotoru, určeného k vytvoření konstantního magnetického toku.jak je znázorněno na obrázku 4 níže.
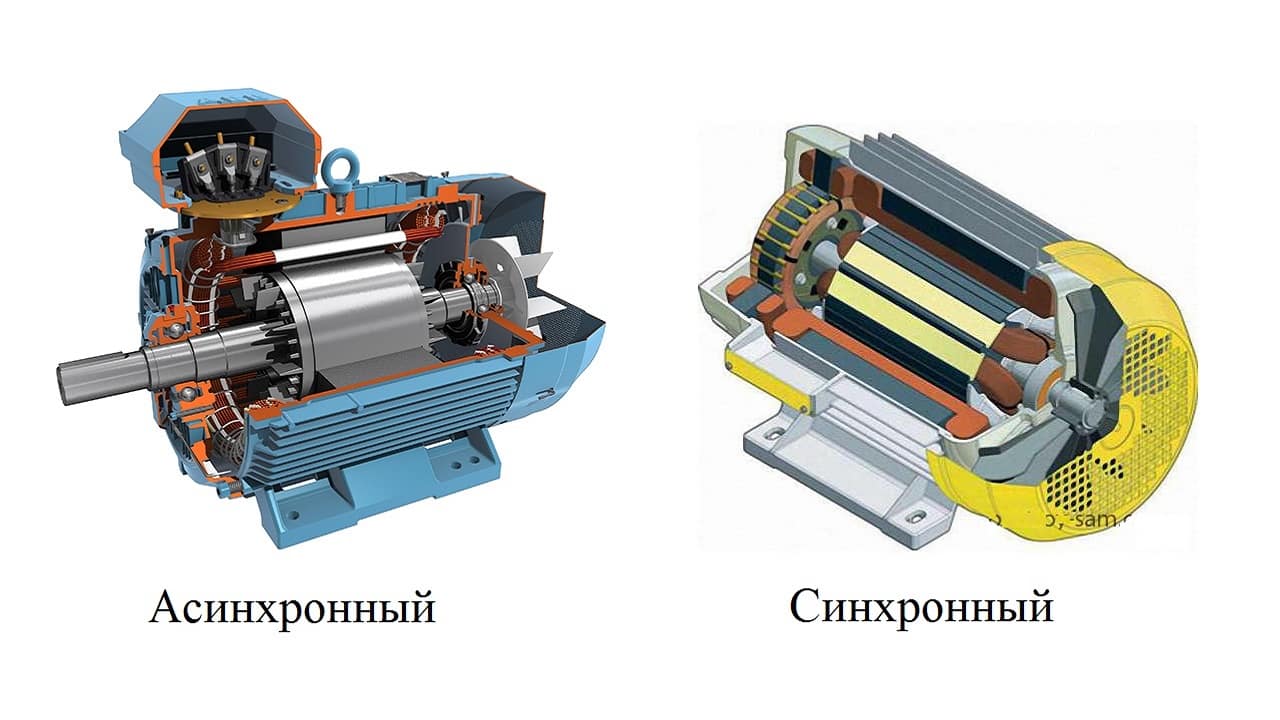
Rýže. 4. Rozdíl mezi asynchronním a synchronním motorem
Toto vinutí vytváří magnetický tok, který nezávisí na přítomnosti elektromotorické síly ve vinutí statoru elektromotoru. Proto při vybuzení synchronního motoru se jeho hřídel začne otáčet současně s polem statoru. Na rozdíl od asynchronního typu, kde je rozdíl v pohybu, který je fyzikálně vyjádřen jako skluz a je vypočítán podle vzorce:
kde s je množství skluzu, měřeno v procentech, n1 je frekvence, se kterou se pole statoru otáčí, n2 je frekvence, při které se rotor otáčí.
Synchronní elektromotory se používají v těch zařízeních, kde je důležité dodržet vysokou přesnost synchronizace napájení a začátku pohybu. Zajišťují také zachování výkonu během spouštění.
V praxi existuje velké množství druhů asynchronních elektromotorů, které se liší jak rozsahem, tak výkonem podle GOST 12139-84. Vzhledem k tomu, že není možné vyjmenovat všechny varianty, budeme zvažovat nejvýznamnější kritéria, podle kterých se asynchronní zařízení dělí na typy.
Podle počtu fází dodávky jsou:
- třífázové – používají se v sítích, kde je možné připojit všechny fáze najednou, ale ve zvláštních případech je lze spustit i v jednofázové síti;
- dvoufázové – používané v mnoha domácích spotřebičích, sestávají ze dvou pracovních vinutí, z nichž jedno je napájeno síťovým napětím a druhé je připojeno přes kondenzátor s fázovým posunem.
- jednofázové – stejně jako předchozí model obsahují dvě vinutí, z nichž jedno je funkční a druhé je spouštěcí.
Podle typu rotoru se rozlišují:
- s rotorem nakrátko – má obtížný rozběh, ale také nižší cenu;
- s fázovým rotorem – na rotoru je instalováno pomocné vinutí, díky kterému je chod elektromotoru plynulejší.
Způsob napájení:
- stator – klasické modely, ve kterých jsou pracovní vinutí instalovány na statoru;
- rotační – pracovní vinutí jsou umístěna na točivém prvku, v praxi se hojně používají asynchronní motory Schrage-Richter.
Způsoby spouštění a schémata zapojení
Indukční motor s kotvou nakrátko má nízkou cenu, vysoké startovací proudy a nízkou startovací sílu. Proto lze pro různé účely použít různé metody spouštění, které snižují zapínací proud ve vinutí a zlepšují výkon:
- stejnosměrné – napětí je dodáváno do elektromotoru přes spouštěče nebo stykače;
- přepnutí schématu zapojení vinutí motoru z hvězdy na trojúhelník;
- pokles napětí;
- hladký start;
- změna frekvence napájecího napětí.
Jednofázový asynchronní motor.
Pro asynchronní jednofázový elektromotor lze použít tři hlavní způsoby spouštění:
Třífázový asynchronní motor.

Třífázové asynchronní jednotky lze připojit následujícími způsoby:
- Přímo do obvodu přes startér nebo stykač, což zajišťuje jednoduchost procesu, ale generuje maximální proudy. Tato metoda není vhodná v případě velkého mechanického zatížení hřídele.
- Přepínání obvodu z hvězdy na trojúhelník – používá se ke snížení proudů ve vinutí motoru snížením napájecího napětí z lineárního na fázové.
- Připojením přes měnič napětí, reostaty nebo autotransformátor snížit potenciální rozdíl. Používá se také změna počtu párů pólů, frekvence napájecího napětí a další.
Třífázové asynchronní motory mohou navíc v obvodu používat přímé a reverzní schéma zapojení. První možnost se používá pouze pro otáčení hřídele motoru v jednom směru. V opačném schématu můžete přepínat pohyb pracovního těla ve směru vpřed a vzad.

Rýže. 9: přímý okruh bez možnosti couvání
Uvažujme nereverzibilní spouštěcí obvod pro asynchronní elektromotor (obrázek 9). Zde přes třípólový jistič QF1 napájení je dodáváno do startéru KM1. Po stisknutí tlačítka SB2 napětí bude přivedeno na vinutí motoru, zastaví se tlačítkem SB1. Tepelné relé KK1 slouží k ovládání teploty topení a žárovky HL1 signalizuje, že stykač je zapnutý.

Obrázek 10: obvod přímého připojení s reverzním chodem
Reverzní obvod (viz obrázek 10) je podobný, ale používá dva spouštěče. KM1 и KM2. Přímé zařazení asynchronního elektromotoru se provádí tlačítkem SB2, a naopak SB3.
přihláška
Rozsah asynchronních elektromotorů pokrývá poměrně velký segment lidské ekonomické činnosti. Proto je lze nalézt v různých typech obráběcích strojů – soustružení, broušení, frézování, válcování atd. Při práci jeřábů, kladkostrojů, kladkostrojů a dalších mechanismů.
Používají se pro výtahy, důlní zařízení, zemní stroje, eskalátory, dopravníky. V každodenním životě je lze nalézt ve ventilátorech, mikrovlnných troubách, pekárnách chleba a dalších pomocných zařízeních. Taková popularita asynchronních elektromotorů je způsobena jejich významnými výhodami.
Výhody a nevýhody
Mezi výhody asynchronních elektromotorů ve srovnání s jinými typy elektrických strojů patří:
- Relativně nižší náklady ve srovnání s jinými typy elektromotorů díky jednoduchosti konstrukce;
- Vysoký stupeň spolehlivosti, kvůli absenci pomocných prvků, zřídka selhávají;
- Schopný odolat krátkodobému přetížení;
- Lze připojit přímo k okruhu bez použití dalšího vybavení;
- Nízké náklady na údržbu během provozu.
Hlavní nevýhodou asynchronního motoru jsou poměrně velké rozběhové proudy a slabý rozběhový moment, což do jisté míry omezuje rozsah přímého spínání. Také asynchronní elektromotory mají nízký účiník a jsou velmi závislé na parametrech napájecího napětí.





