Elektrický pohon instalace musí plně vyhovovat požadavkům technologického procesu a vyhovovat podmínkám prostředí při provozu. Zároveň pro elektrický pohon je třeba zvolit co nejjednodušší motor z hlediska konstrukce a ovládání, spolehlivý v provozu, s nejmenší hmotností, rozměry a cenou.
Výběr elektromotorů se provádí s ohledem na následující parametry a ukazatele:
– druh proudu a jmenovité napětí;
– jmenovitý výkon a otáčky;
– způsob rozjezdu a brzdění;
– vlastnosti regulace rychlosti;
Nejjednodušší z hlediska zařízení a ovládání, spolehlivé v provozu, mající nejmenší hmotnost, rozměry při daném výkonu jsou asynchronní motory s rotorem nakrátko.
Volba motorů pro ochranu životního prostředí musí být provedena v souladu s podmínkami, ve kterých bude pracovat.
Spolehlivost elektropohonu a jeho účinnost závisí na správné volbě výkonu motoru v souladu se zatížením jeho hřídele, což zajišťuje spolehlivý a ekonomický provoz elektropohonu, minimální náklady na zařízení a nejnižší energetické ztráty při provozu mechanismu. Nedostatečný výkon motoru vede k jeho přetížení, způsobuje nepřijatelné oteplování jednotlivých dílů, snižuje životnost izolace vinutí a vede k rychlému selhání motoru. Při nadměrném výkonu motoru se zvyšují počáteční náklady, rostou rozměry, hmotnost a náklady, zvyšují se provozní náklady v důsledku poklesu účiníku a účinnosti.
Výpočet výkonu motoru pro různé typy mechanismů a strojů má značné rozdíly.
Hlavními prvky řezného režimu při frézování jsou hloubka řezu a šířka řezu frézování. Vypočítejme výkon elektromotoru hlavního pohonu M1 pomocí následujícího vzorce:
kde Р z – řezný výkon, kW;
– účinnost stroje při jmenovitém zatížení (0,75. 0,8);
Fz – řezná síla nebo maximální tažná síla, N;
vz – nejvyšší rychlost rychlého pohybu, m/min.
Podle technických vlastností stroje řezná síla Fz u0,2d XNUMX N, nejvyšší rychlost rychlého pohybu vz= 3000 mm/min.
Pro pohon hlavního pohybu stroje volíme asynchronní motor s rotorem nakrátko typu 4A180M8 / 6/4-U3.
Výkon na hřídeli motoru, kW 12,5
Počet otáček za minutu, ot./min
– při první rychlosti 735
– při druhé rychlosti 985
– při třetí rychlosti 1420
Účinnost při jmenovitém zatížení, % 83
cos při jmenovité zátěži 0,93
Elektromotory řady 4A mají ve srovnání s elektromotory řady A2 a A02 nižší hmotnost (v průměru o 18 %), rozměry, hlučnost a vibrace, vysoké rozběhové momenty a zvýšenou provozní spolehlivost.
Vypočítejme výkon elektromotoru hydraulického pohonu M2 na základě jmenovitého momentu.
Motor vyvíjí jmenovitý moment Mn při jmenovitých otáčkách nн. Pokud je tedy na základě technologických podmínek a provozních režimů mechanismu znám jmenovitý točivý moment, lze výkon motoru zjistit pomocí následujícího vzorce:
Podle technických charakteristik stroje je jmenovitý krouticí moment Mn = 10,5 N * m.
Pro pohon posuvu M2 stroje volíme asynchronní elektromotor s rotorem nakrátko typu 4A80V6–U3.
Výkon na hřídeli motoru, kW 1,1
Počet otáček za minutu, 1000 ot./min
Účinnost při jmenovitém zatížení, % 74,0
cos při jmenovité zátěži 0,74
Vypočítejme výkon mazacího elektrického čerpadla M3 podle následujícího vzorce:
kde je bezpečnostní faktor (1,1…1,5);
– hustota kapaliny, N/m3
– účinnost čerpadla (0,6 . 0,9);
– průtok čerpadla, m 3 / s.
Podle technických charakteristik stroje průtok čerpadla = 0,41 m 3 /s, hustota kapaliny = 19000 N/m 3, tlak H = 5 m.
Jako elektrické mazací čerpadlo volíme čerpadlo typu PA–22U2.
Výkon na hřídeli motoru, kW 0,12
Počet otáček za minutu, 2800 ot./min
Účinnost při jmenovitém zatížení, % 80
Produktivita, l/min 22
Vypočítejme výkon elektromotoru šroubového pohonu M4 podle vzorce [2.2]. Podle technických charakteristik stroje je jmenovitý krouticí moment Mn = 3,5 N * m.
Pro pohon posuvů stroje volíme asynchronní elektromotor s rotorem nakrátko typu 4A71A4-U3.
Výkon na hřídeli motoru, kW 0,55
Počet otáček za minutu, 1390 ot./min
Účinnost při jmenovitém zatížení, % 70,5
cos při jmenovité zátěži 0,7
Vypočítejme výkon elektromotoru šroubového pohonu M5 podle vzorce [2.2]. Podle technických charakteristik stroje je jmenovitý krouticí moment Mn = 25,5 N * m.
Pro pohon posuvů stroje volíme asynchronní elektromotor s rotorem nakrátko typu 4A100LB4–U3.
Výkon na hřídeli motoru, kW 4,0
Počet otáček za minutu, 1430 ot./min
Účinnost při jmenovitém zatížení, % 84,0
cos při jmenovité zátěži 0,84
Vypočítejme výkon elektrického chladicího čerpadla M5 podle následujícího vzorce:
kde je bezpečnostní faktor (1,1…1,5);
– hustota kapaliny, N/m3
– účinnost čerpadla (0,6 . 0,9);
– průtok čerpadla, m 3 / s.
Podle technických charakteristik stroje průtok čerpadla = 0,35 m 3 /s, hustota kapaliny = 11000 N/m 3, tlak H = 5 m.
Jako elektrické mazací čerpadlo volíme čerpadlo typu PA–22U2.
Výkon na hřídeli motoru, kW 0,12
Počet otáček za minutu, 2800 ot./min
Účinnost při jmenovitém zatížení, % 80
Produktivita, l/min 22
Vypočítejme výkon elektromotoru pro pohon periodického pohybu frézy M7 podle vzorce [2.2]. Podle technických charakteristik stroje je jmenovitý krouticí moment Mn = 2,4 N * m.
Pro pohon posuvů stroje volíme asynchronní elektromotor s rotorem nakrátko typu 4AA63V4-U3.
Výkon na hřídeli motoru, kW 0,37
Počet otáček za minutu, 1365 ot./min
Účinnost při jmenovitém zatížení, % 68,0
cos při jmenovité zátěži 0,69
Líbil se vám článek? Přidejte si ji do záložek (CTRL+D) a nezapomeňte ji sdílet se svými přáteli:
Výkon motoru se volí podle zatížení jeho hřídele. Jeho hodnota musí také splňovat podmínku, že průměrná teplota motoru nepřekročí povolenou hodnotu vzhledem k třídě izolace vinutí. Kromě toho je výběr motoru dán podmínkami spouštění a přetížitelností.
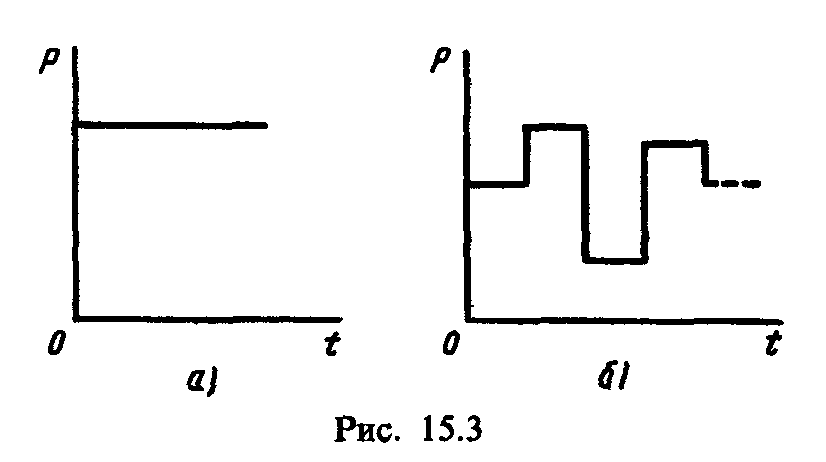
Volba výkonu motoru pro nepřetržitý provoz. Při nepřetržitém provozu může být zatížení motoru konstantní (obr. 15.3, a) nebo proměnné (obr. 15.3, b). Volba motoru s konstantním zatížením se provádí podle katalogu. V tomto případě je nutné zvolit motor o jmenovitém výkonu Pnom ≥ R.
Při proměnném zatížení, kdy je kontinuální režim přerušovaný, se výpočet nebo ověření správnosti předběžného výběru výkonu motoru provádí na základě graf zatížení (obr. 15.4). Pokud určíme teplotu maximálního zahřátí motoru Tmaxa porovnejte ji s přípustnou teplotou ohřevu Tdalší, pak správná volba motoru odpovídá podmínce Tmax ≤ Tdalší. Vzhledem ke složitosti a těžkopádnosti stanovení hodnoty Tmax, tento způsob výběru motoru se v praxi nepoužívá.
Volba výkonu motoru v jakémkoli provozním režimu, pohodlný způsob průměrné ztráty. Metoda je založena na podmínkách, za kterých je průměrná ztráta výkonu ΔРženatý motoru během doby cyklu tц nepřekračujte ztráty při jmenovitém zatížení ΔPnom, tedy ΔРženatý, ≤APnomNebo
kde ∆Pц – ztráta výkonu v motoru za cyklus; ΔРi – ztráta výkonu v čase ti, při kterém motor pracuje s konstantním zatížením Pi.
Metoda průměrné ztráty, i když je přesnější než ekvivalentní hodnoty, není vždy použitelné kvůli nedostatku potřebných informací o motoru. V praxi se proto výkon motoru při proměnném zatížení volí podle přibližných metod ekvivalentního proudu, ekvivalentního výkonu nebo ekvivalentního točivého momentu.
na metoda ekvivalentního proudu skutečné proudy motoru 1, I2, I3. Ján na Obr. 15.4 se a) v jednotlivých časových obdobích nahrazuje ekvivalentním proudem Iэ konstantní hodnotu, vytvářející se za chodu motoru (t1 +t2 + . +tn) stejné ztráty v motoru jako skutečné proudy.
Když motor běží, ztráty výkonu jsou součtem konstantních (nezávislých na zatížení) ΔРumění. (ztráty v oceli) a proměnné ΔPMi = mli 2 r (ztráty v mědi), kde m je počet fází při střídavém proudu; r je odpor vinutí motoru.


Během doby tц stejné ztráty způsobuje ekvivalentní proud Iэ:
Porovnáním (15.3) a (15.4) zjistíme, že odkud

Stav zahřívání motoru (Tmax ≤ Tdalší) bude dodrženo, pokud
Chcete-li určit výkon motorů, ve kterých je točivý moment téměř úměrný proudu, můžete použít zatížení momentové diagramy M = f(t) (například pro bočníkové stejnosměrné motory as určitou rezervou pro asynchronní motory s malou změnou zatížení). Analogicky s (15.5) můžeme napsat:
Podmínkou pro výběr motoru je v tomto případě Mэ ≤ Mн.
Pokud motor pracuje s nízko se měnícími otáčkami a existuje graf jeho výkonového zatížení (obr. 15.4, b), pak je zvolen motor s jmenovitým výkonem rovným nebo větším než ekvivalentní výkon, stanovený obdobně jako (15.6). ), podle vzorce
Po výběru výkonu motoru na základě jedné z metod ekvivalentních hodnot je nutné zkontrolovat motor na přetížitelnost, která se vyznačuje součinitel přetížení. Faktor přetížení kп je poměr maximálního povoleného momentu motoru Mmach dop ke svému jmenovitému momentu Mnom.
Aby byly splněny požadavky na krátkodobá přetížení tohoto pohonu, je nutné, aby maximální přípustný moment motoru byl roven nebo větší než maximální zatěžovací moment na hřídeli motoru: Mmach dop ≥Mmax. Jinými slovy, podmínka kп > Mmax/Mnom. Přetížitelnost pro různé motory je různá. Pro asynchronní motory kп = 1,7 ÷ 3,5, pro synchronní motory kп ≥ 1,65, pro stejnosměrné motory s nezávislým a smíšeným buzením kп = 2 ÷ 2,5 a pro motory se sekvenčním buzením kп = 2,5 ÷ 3.
Při výběru asynchronních motorů s kotvou nakrátko je kromě kontroly přetížitelnosti nutné volit podle rozběhového momentu Mstart-up, protože pro takové motory je tato hodnota obvykle malá. V tomto případě je nutné dodržet podmínku Mstart-up > Ms.začátek, kde Ms.začátek – počáteční statický moment vytvořený výrobním strojem nebo poháněným mechanismem.
Volba výkonu elektromotoru pro přerušovaný provoz. Protože se motor během provozu v tomto režimu často spouští a vypíná, během zrychlování, brzdění a zastavování se zhoršuje ventilace a tím i chlazení motoru. To je zohledněno zavedením korekčních faktorů, které závisí na typu motoru a způsobu jeho chlazení. Jak již bylo zmíněno dříve, přerušovaný režim je charakterizován hodnotou PV (15.1). Pokud má plán provozu motoru podobu znázorněnou na obr. 15.2, c, pak se jmenovitý výkon motoru zvolí rovný ekvivalentnímu výkonu:

Pokud má pracovní program motoru složitější podobu (viz obr. 15.3), pak je ekvivalentní výkon určen vzorcem

kde P’e je ekvivalentní výkon motoru bez zohlednění jeho vypnutí; hodnota PV je určena jako
Pokud se návrhová hodnota pracovního cyklu výrobního stroje získaná podle zátěžového diagramu liší od standardní hodnoty pro motory, pak se volí podle nejbližší standardní hodnoty pracovního cykluST, respektive přepočet výkonu Р’э podle vzorce
Při výběru motoru pro přerušovaný provoz podle katalogu je nutné znát Р’э a PV. Kontrola zvoleného motoru na přetížení a rozběhový moment v tomto režimu je povinná.
Je třeba poznamenat, že při určování výkonu motoru metodou ekvivalentních hodnot a relativní doby zapnutí se nebere v úvahu počet startů motoru za hodinu a v důsledku toho doba a intenzita zahřívání motoru. v režimu startování a brzdění. Přesnější výpočet výkonu motoru lze provést metodou průměrných ztrát as povinnou kontrolou přetížení a rozběhových momentů.





